Submachine Universe译稿5
Coordinate Systems Theory
坐标系理论
by:Zerpentos
Preface
序
Despite an abundance of theories and the occurrence of much research and exploration, the Submachine remains a mystery. However, few studies have addressed the technological and mathematical features of the Submachine and the Submachine Network (Subnet).
This essay will examine the historical development of the Submachine from a generally mathematical perspective and will derive a conclusion from this account.
尽管有丰富的理论和大量的研究和探索,Submachine本身仍然是一个谜。然而,很少有研究涉及Submachine和Submachine网络(Subnet)的技术和数学特征。
本文将从一般的数学角度考察该子机器的历史发展,并由此得出结论。
History and Development
历史与发展
Defining the Submachine
定义Submachine
In order to construct an account of the history of the Subnet, we must first define the Submachine. The consensus is that a Submachine is a terminal with a coordinate input. When a coordinate has been set and a button has been pressed, an algorithm is executed and the user is transported to the location at the set coordinate. Essentially, the Submachine is a teleportation device - a portal. This is the definition that this essay uses, but note that a Submachine could also be the collective term for a location that a portal is situated in.
为了描述Subnet历史,我们必须首先定义Submachine。一致认为,Submachine是一个具有坐标输入的终端。设置坐标并按下按钮后,执行算法并将用户传输到设置坐标处的位置。本质上,子机器是一个远程传输设备——即一个入口。这是本篇文章使用的定义,但请注意,Submachine也可以是传送门所在位置的集合术语。
Root Submachines
The first Submachine was first established in 1904 by an unnamed scientist. In those decades past, technology was rather primitive by modern standards. Despite this, the scientist was able to create something that was far ahead of the 20th century.
This first Submachine has been given the name of the Root, and based on qualitative observations, seems to be located in a large and underground cavern – hence the name “submachine” – submerged machine.
Features of the Root include a lighting system connected in series, speakers/microphones, cables, and the much-studied “observation room”. This observation room was presumably installed much later on, in the 1950s, perhaps due to the availability of video technology.
Nevertheless, we see a lack of artificial intelligence, and instead, a large array of devices with specific tasks that are designed to be used manually by humans. Something else to note is that the kinds of devices in use seem to work in conjunction as a sort of infrastructure for a testing environment. Could the Submachine have been a human project?
We then have the actual Submachine. It is a device located in the middle of this initial chamber which, using a set of two variables (most likely x and y of the Cartesian coordinate system), is able to teleport the user to a specific location. This location is determined by the coordinate input, which is done via a set of six cipher plates.
If there are six cipher plates and two possible variable combinations, then we know there must be a maximum of 43 different locations that can be travelled to. The sets of ordered pairs are:
00-06 10-16 (no 11) 20-26 (no 22) 30-36 (no 33) 40-46 (no 44) 50-56
(no 55) 60-66 (no 66)
These sets are only found in the first quadrant of the two-dimensional Cartesian plane, QI. This implies that the first Submachine does not encompass negative coordinates and therefore cannot expand its functions into QII, QIII and QIV.
It is evident the first Submachine functions in a very systematic manner. For example, using ‘a’ as the left cipher slot and ‘b’ as the right cipher slot:
User inputs a.
If a = 0, set x = 0 in (x,y).
User inputs b.
If b = 0, set y = 0 in (x,y).
From database, (x,y)=(0,0)=_origin
Therefore, send user to _origin.
This essay will refer to the first Submachine as the “Root Submachine” and will treat it as a type of Submachine.
第一台Submachine是1904年由一位无名科学家首次建立的。按现代标准来看,这台几十年前的机器的技术相当原始。尽管如此,这位科学家还是能够创造出科技水平远高于20世纪的东西。
第一台Submachine被命名为“root”,根据定性观察,它似乎位于一个大型地下洞穴中,因此被命名为“Submachine”——“潜水机”。
root的特点包括一个串联的照明系统、扬声器/麦克风、电缆和用于广泛研究的“观察室”。可能是由于当时能够应用视频技术,这个观察室大概是在20世纪50年代后期安装的。
然而,因为缺乏人工智能,取而代之的是被设计成人工使用的大量具有特定任务的设备。另外需要注意的是,所使用的设备似乎被作为测试环境的一种基础设施而进行协同工作。
所以Submachine可能是人类的项目吗?
接下来,我们就有了真正的Submachine。它是一个位于初始室中间的装置,使用一组两个变量(最有可能是笛卡尔坐标系的x和y),可以将用户传送到特定位置。该位置由坐标输入决定,坐标输入通过一组六个密码板完成。
如果有六个密码板和两个可能的变量组合,那么我们知道最多可以到达43个不同的位置。这些有序数对的集合为:
00-06 10-16 (no 11) 20-26 (no 22) 30-36 (no 33) 40-46 (no 44) 50-56
(no 55) 60-66 (no 66)
这些集合只在二维笛卡尔平面的第一象限中找到。这意味着第一个Submachine不包含负坐标,因此无法将其功能扩展到二三四象限。
很明显,第一个Submachine以非常系统的方式工作。例如,使用“a”作为左密码槽,“b”作为右密码槽:
User inputs a.
If a = 0, set x = 0 in (x,y).
User inputs b.
If b = 0, set y = 0 in (x,y).
From database, (x,y)=(0,0)=_origin
Therefore, send user to _origin.
本篇论述将第一个Submachine称作“Root Submachine”,而且其也是Submachine中的一种。
xyz Submachines
A Submachine that is more familiar to us is the three-coordinate one. It seems more compact, independent, and has a larger range of function. It is no longer attached to large sets of cables and pipes, but rather, functions on its own. This suggests it has a built-in power source. Furthermore, it encompasses three coordinate variables: x, y and z.
Like the Root Submachine, this newer Submachine can still only function in QI (it has no negative coordinate support), but now on a three-dimensional plane. This provides a far larger magnitude of locations it can encompass, as shown by this example, using a = x, b = y, and c = z.
User inputs a.
If a = 2, set x = 2 in (x,y,z).
User inputs b.
If b = 5, set y = 5 in (x,y,z).
User inputs c.
If c = 7, set z = 7 in (x,y,z).
From database, (x,y,z)=(2,5,7)=_257
Therefore, send user to _257.
Another interesting feature to note about both Submachine models is that they support a maximum coordinate value of only 9 or less (0 ≤ x ≤ 9). Note that the Root model can potentially exceed this feature, provided there is evidence of more than 9 types of cipher plates – location 553 suggests such a possibility as it has space for 12 cipher plates.
It is also necessary to consider the Loop, which has been theorized to be the true form of the Submachine. What is so interesting about the Loop is that it is an incredible step ahead of past Submachine technology. Although we do not teleport from coordinate to coordinate, we move around in coordinates, as shown to us by a device we pick up.
Even though this coordinate system functions only on a two-dimensional level (x,y), it features a domain of {xєZ} and a range of {yєZ}, meaning it expands infinitely in both directions. We now have a system that supports all four quadrants. In addition, the human authorship we perceived earlier now seems to start diminishing, and it becomes possible that the Loop is not a creation of man but of the Submachine itself.
Let’s take the defense system area as another example of this. We finally see a fully fledged three-dimensional and ({xєZ},{yєZ}) system when viewing the Subnet Infestation Map. We can logically assume that the Core, notated by C, is the origin, (0,0). If so, we have an infinite expanse in both positive and negative directions.
To prove the three-dimensional concept for a final instance, we can examine the grid that appears before we leave for the Subnet Defense System in the S1 Mover. The grid shows three axes, clearly x, y, and z, indicating a three-dimensional travel path. The Mover itself travels on the z axis.
It is evident that over time, humans departed from the Submachine as it became a more self-maintaining system. It is unclear whether the humans or the Submachine itself developed the artificial intelligence that is observable in the Edge, but the point is that the artificial intelligence exists. Whereas the Root was clearly maintained by humans, such a human-based system is no longer necessary in the Edge. Instead, self-updating graphs and various algorithms (i.e. protocols) can be found in the binary layers of the Subnet Defense System. The Subnet Defense System is able to collect results and behave accordingly as dictated by the protocols.
However, because the System can be accessed by physical terminals, some form of maintenance must still occur. This is no doubt performed by sub-bots, who function very systematically. Sub-bots are integral to the maintenance infrastructure in the Subnet Defense System. This is found in the form of identity cards, personal identification number (pIDN) entry points, and connection pod terminals. At certain moments, the binary program of the Subnet Defense System can request assistance with repairing a function – it cannot fix itself and requires external aid.
In expansion, sub-bots are known to visit xyz coordinates and ensure that everything is functional. Evidence of this can be found in location 947, where a pipe breakage has caused a loss of 20% of sub-energy harvested from a wisdom gem. A sub-bot has left a report in that location specifying details. It is unknown what will occur afterwards, but it is likely that the event is recorded in a large “library” or “archive” in the Edge, or perhaps even in the Core.
我们更熟悉的Submachine是三维传送机。它看起来更轻便,更独立,功能范围更广。它不再与大型电缆和管道相连,而是独立运行。这表明它有内置电源。此外,它包含三个坐标变量:x、y和z。
像RootSubmachine一样,这个新的Submachine仍然只能在第一象限中工作(它没有负坐标支持),但现在可以在三维平面上传送。如本例所示,使用a=x、b=y和c=z可以提供更多的位置。
User inputs a.
If a = 2, set x = 2 in (x,y,z).
User inputs b.
If b = 5, set y = 5 in (x,y,z).
User inputs c.
If c = 7, set z = 7 in (x,y,z).
From database, (x,y,z)=(2,5,7)=_257
Therefore, send user to _257.
关于这两种Submachine模型的另一个有趣的性质是它们只支持9或更小的最大坐标值(0≤x≤9)。请注意,如果有超过9种类型的密码板,Root模型可能会超过这一特性-位置553表明存在这样的可能性,因为它有12个密码板的空间。
此外,还需要考虑Loop,这已被理论化为Submachine的真实形式。Loop的有趣之处在于它比过去的Submachine技术领先了一大步。虽然我们不会从一个坐标传送到另一个坐标,但我们会在坐标中移动,就像我们接收到的设备所显示的那样。
尽管该坐标系仅在二维(x,y)上起作用,但它具有x-z和y-z的范围,这意味着它在这两个方向上无限扩展。我们现在有了一个支持所有四个象限的系统。此外,我们先前所发现,人写的笔记似乎开始减少,而且Loop可能不是人造的,而是Submachine本身造的。
让我们以防御系统区域为例。在查看Subnet入侵地图时,我们最终看到了一个成熟的三维(x_z,y_z)系统。我们可以从逻辑上假设,用c表示的核心是原点(0,0)。如果是这样,我们在正负两个方向上都存在一个无限的空间。
为了证明最后一个实例的三维概念,我们可以检查在S1移动器中离开Subnet防御系统之前出现的网格。网格显示三个轴,清晰地显示X、Y和Z,表示三维行进路径。移动器本身沿Z轴移动。
很明显,随着时间的推移,人类离开了Submachine,因为它变成了一个更注重自我维护的系统。目前尚不清楚人类或其子机器本身是否发展出了可以在边缘观察到的人工智能,但关键是人工智能的存在。虽然Root由人类清楚地维护着,但是这样一个基于人类的系统在边缘不再是必要的。相反,可以在Sub net防御系统的二进制层中找到自我更新图和各种算法(即协议)。Subnet的防御系统能够收集结果,并根据协议的要求进行相应的操作。
但是,由于系统可以通过物理终端访问,因此必须进行某种形式的维护。这无疑是由Sub bot执行的,它们的功能非常系统。Sub bot程序是Sub net防御系统中维护基础设施的组成部分。这可以通过身份证、个人识别号(PIDN)入口点和连接盒终端的形式找到。在某些时刻,Sub net防御系统的二进制程序可以请求帮助修复某个功能——它不能自行修复,需要外部帮助。
在扩展中,已知Sub bot访问了这些XYZ坐标并确保所有功能正常。这一点的证据可以在947号位置找到,在那里,管道破裂导致了智慧宝石产生的20%的Sub能量损失。一个Sub bot程序在该位置留下了一个指定详细信息的报告。不知道之后会发生什么,但很可能事件记录在边缘的大型“库”或“存档”中,甚至可能记录在核心中。
Absolute and Relative Coordinates
This essay postulates two kinds of coordinate systems – absolute and relative. The absolute coordinates are the ones that the three-variable Submachines make use of. Relative coordinates are positions relative to an absolute coordinate.
Legacy of the Root
The Root Submachine was not totally abandoned after newer Submachines came into play. An example is required to illustrate this.
The absolute coordinate for the Root is 552. However, relative to itself, the Root is at (0,0). Cipher plates allow movement from this relative origin to other points. They could be used to move to a location like (1,2). Although one would be 1 x-unit and 2 y-units away from the origin, they would still be in 552. This suggests that xyz coordinates are not point locations, but instead, cubes or spheres of volume.
Whether each different absolute coordinate has different cipher plate designs or not is unknown at this time. However, this would not matter since different Root Submachines are totally independent of each other.
Cipher plate terminals have been found in other coordinates since the commencement of the Submachine Network Exploration Experience project. Such coordinates include 076, 218, 378, 553, and 837.
Loops
The Loop, and loops in general, function via the absolute and relative coordinate systems. Each individual loop has its own relative origin, and then expands infinitely in both x and y directions relative to this origin. However, each individual loop is also absolutely located on a large two- or perhaps three-dimensional and infinite grid. When in the Loop, the teleportation device is activated, it is possible that it selects a random absolute coordinate and teleports the user there.
本文假设了两种坐标系——绝对坐标系和相对坐标系。绝对坐标是三变量子机使用的坐标。相对坐标是相对于绝对坐标的位置。
来自root的遗产
在新的Submachine投入使用后,root submachine并没有完全废弃。需要一个例子来说明这一点。
root的绝对坐标是552。但是,相对于自身而言,根位于(0,0)。密码板允许从这个相对原点移动到其他点。它们可以被用来移动到像(1,2)这样的位置。虽然其中一个X单元和2个Y单元会远离原点,但它们仍然是552个。这表明XYZ坐标不是点位置,而是立方体或球体。
目前还不清楚每个不同的绝对坐标是否有不同的密码板设计。然而,这并不重要,因为不同的root submachine完全独立于彼此。
Sub net勘探经验项目启动后,在其他坐标系中发现了密码板终端。这些坐标包括076、218、378、553和837。
Loop
Loop,和一般的循环,通过绝对坐标系和相对坐标系起作用。每个单独的循环都有自己的相对原点,然后在相对于该原点的X和Y方向上无限扩展。然而,每个单独的循环也绝对位于一个大的二维或三维无限网格上。当在循环中,远程传送设备被激活时,它可能选择一个随机的绝对坐标并远程传送用户。
Conclusion
The Subnet is an array of independent locations interconnected by teleportation devices called Submachines. This system is based on several coordinate planes – the largest being infinitely expanding in all directions (x, y and z). The Submachine was once a human project which progressively became more advanced and self-maintaining. Currently, all exploration in the Subnet is being done in QI, but if the spherical model of the Submachine is correct, more advanced Submachines, more advanced Submachines with negative coordinate support will allow the other three quadrants to be explored.
总结
Subnet是由称为Submachine的远程传输设备互连的独立位置阵列。这个系统基于几个坐标平面——最大的是在所有方向(x、y、z)无限扩展。Submachine曾经是一个人类项目,其逐渐变得先进和更注重自我维护。目前,子网中的所有勘探工作都是在第一象限中进行的,但是如果Submachine的球面模型正确,那么更先进的负坐标支持的Submachine将允许其他三个象限进行勘探。
Summary
·A Submachine is a teleportation device that functions on a coordinate system.
·The Submachine’s coordinate system has developed over time. It was first two-dimensional and had a finite range. It then became three-dimensional and developed a range of -∞ ≤ x,y,z ≤ ∞.
·There are two types of coordinates – absolute and relative.
·Absolute coordinates are like the xyz coordinates and are defined with an origin (perhaps the Core) as a frame of reference.
·Relative coordinates are combinations of cipher plates.
·Each absolute coordinate may have its own set of relative coordinates.
·Thus, each xyz Submachine may have its own Root Submachine.
·As a result, xyz coordinates are not point locations, but spheres or cubes of volume.
·The Submachine Network (Subnet) can expand indefinitely.
·Humans created the Submachine and were central in its early stages.
·As they continued developing it, they eventually left it, and it independently grew to maintain itself and expand on its own.
·Most Submachines, the Edge, and perhaps the Core are all maintained by sub-bots, which continue to update a sort of “maintenance library” or “maintenance archive”.
概括
·Submachine是一种在坐标系上工作的远程传输设备。
·随着时间的推移,该Submachine的坐标系逐渐发展起来。它是第一个二维的,范围有限。然后,它变成三维的,发展出一个范围-∞≤(x,y,z)≤∞。
·坐标有两种类型——绝对坐标和相对坐标。
·绝对坐标与XYZ坐标类似,以原点(可能是核心)定义为参考系。
·相对坐标是密码板的组合。
·每个绝对坐标可以有自己的一组相对坐标。
·因此,每个XYZ Submachine可能都有自己的Root Submachine。
·因此,XYZ坐标不是点位置,而是体积的球体或立方体。
·Subnet(子网)可以无限扩展。
·人类创造了Submachine,并在早期处于中心位置。
·当他们继续发展它的时候,他们最终离开了它,之后它独立地成长以维持自身并独立地扩展。
·大多数Submachine、边缘和核心都由Sub bot程序维护,这些Sub bot程序会继续更新一种“维护库”或“维护档案”。
Gallery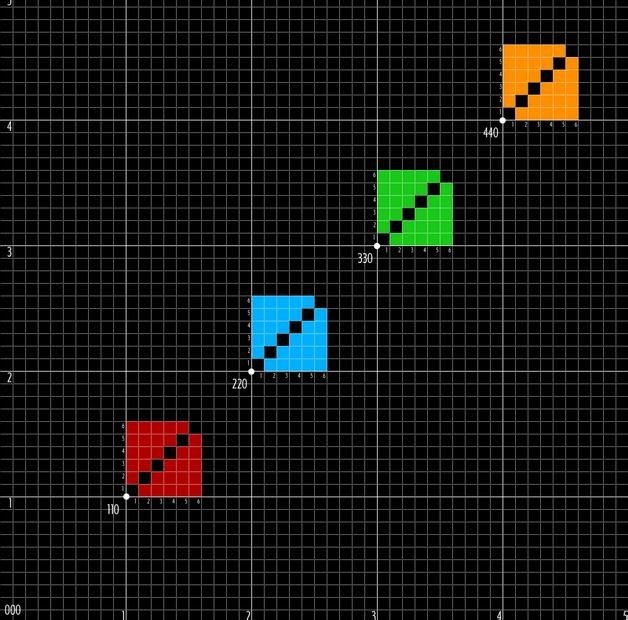
几个Root Submachine的绝对和相对坐标模型。

单个的无限展开绝对坐标的球面模型。每个球体都是相对坐标。这可以建立一个三维循环模型。
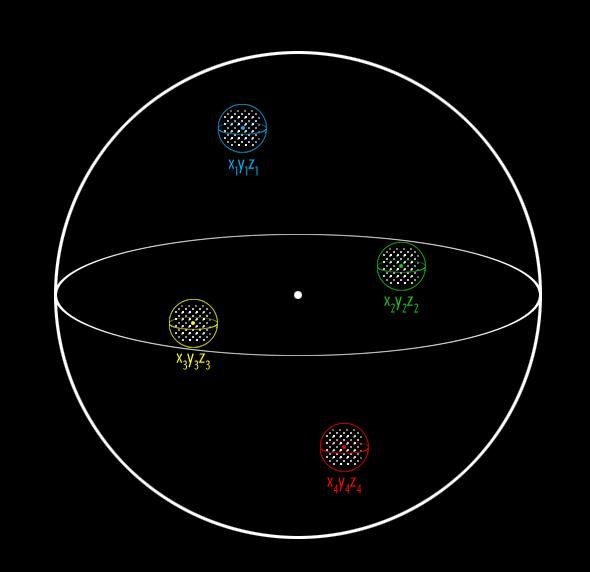
Subnet的三维球面概念模型。
Afterword
I credit any other researchers and theorists who contributed to this essay, or pointed out any flaws. Please excuse any inaccuracies in this essay. It was a long study to write, but I do hope that it furthers Submachine and/or general Subnet theory.
后记
我希望其他的研究工作者和理论家可以指出任何有关此文章的建设性缺陷。请包涵这篇文章中的任何错误。写这篇文章花费了我很长的研究,但我确实希望它能促进Submachine或者通用Subnet理论。
![SU][6]
卡尔霍恩译
2019.5.28